




Abstract
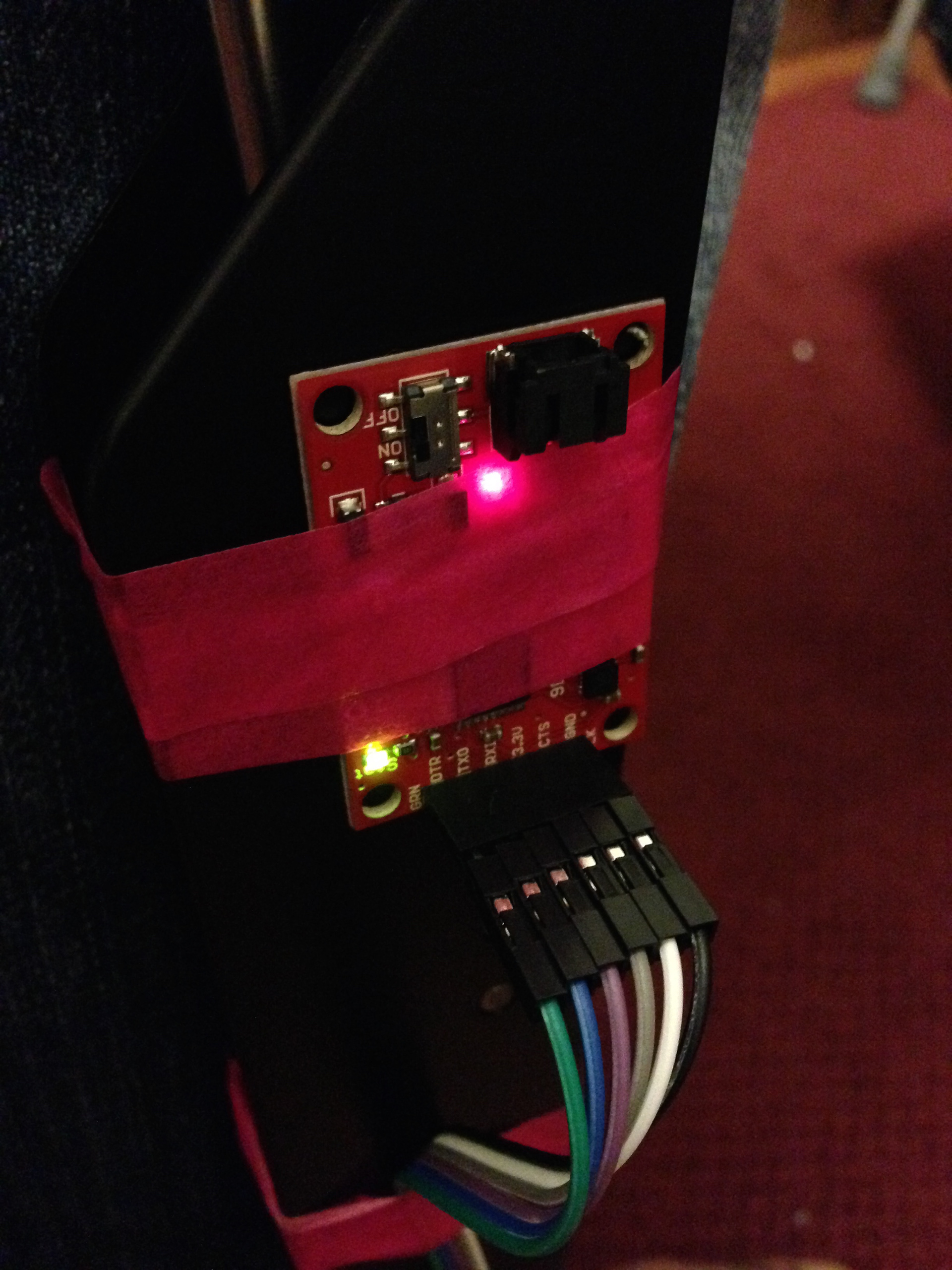
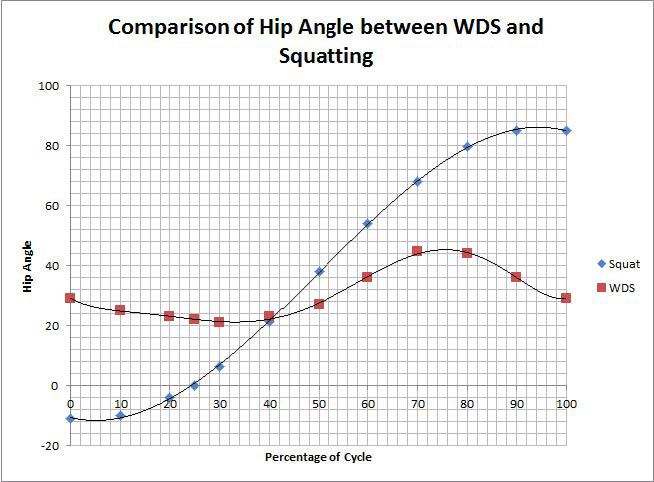
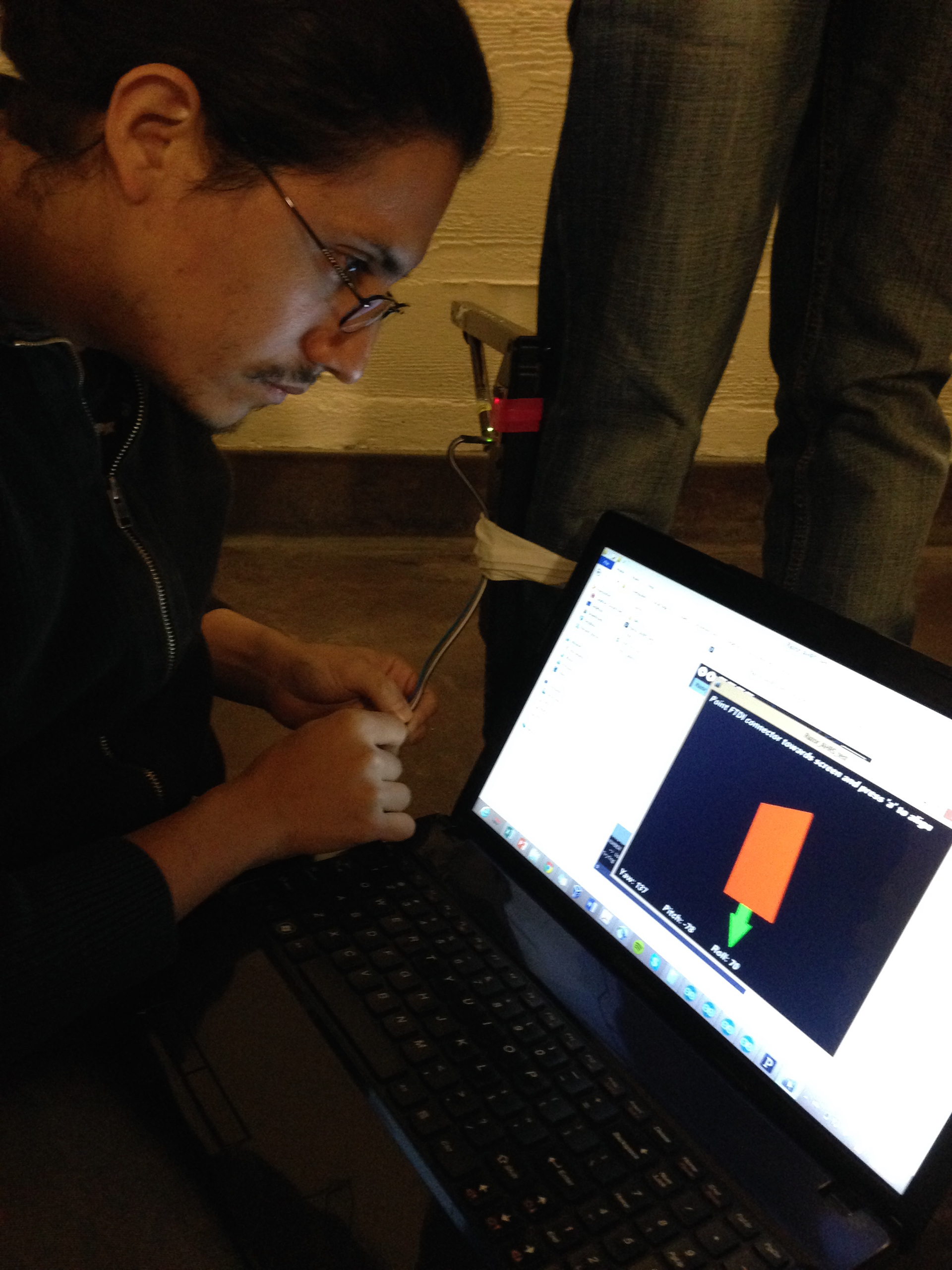
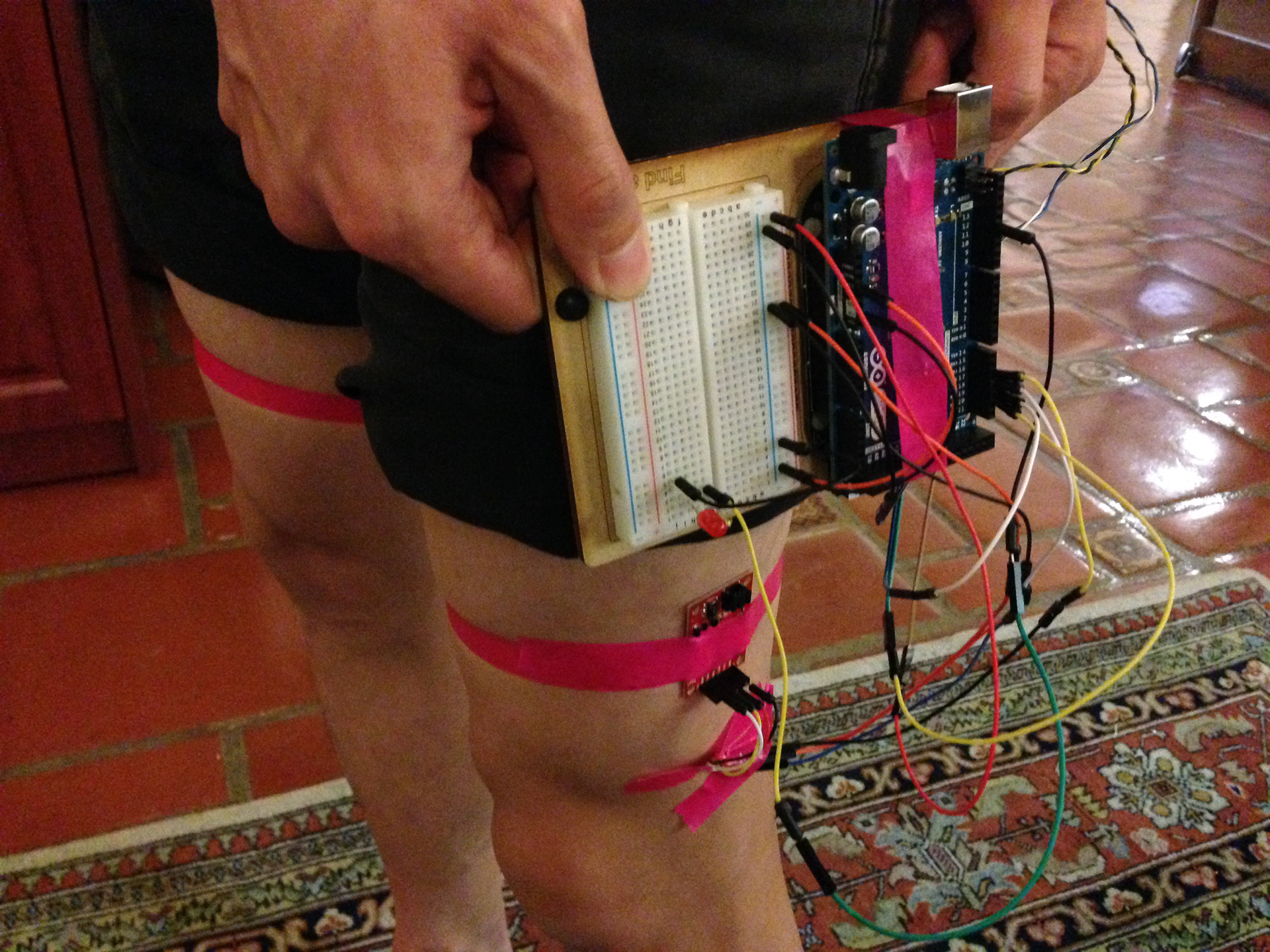
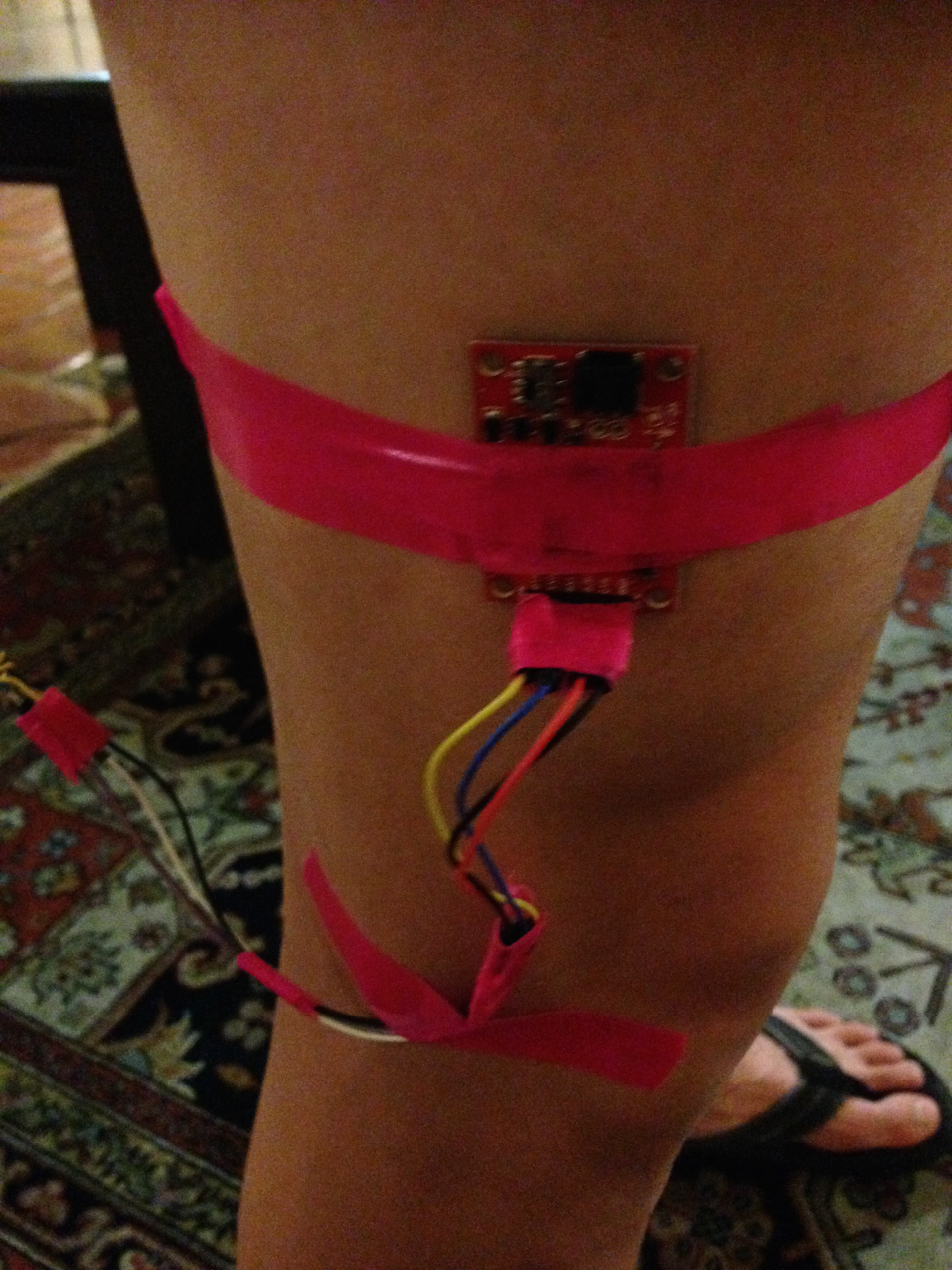
The industrial exoskeleton is intended to aid workers in industries where injury rate is high due to the extraneous activities required by such occupations as construction. The team developed a design that can distinguish between squatting, a common strenuous industrial activity, and other activities such as walking down stairs. The device can then assist the user during squatting, reducing the strain on their body. With reference to an existing passive design, the team set goals to improve range of motion and improve trigger control. The team first explored a passive mechanism with purely mechanical control due to simplicity, but an active system (mix of mechanical and electronic control) was finally chosen as a design choice. This was mainly because it allowed a more flexible design in terms of user weight and squatting form, and also allows the two legs to communicate and trigger together. After exploring a few different designs, the team began to study the feasibility of using IMUs to gather angle data and RF transceivers to send and receive the data while maintaining the need for a servo in the design. The IMUs would measure how the user was moving and the RF tranceivers would communicate this information to a microprocessor. If the microprocessor found that the user was squatting, it would activate the assist mechanism using the servo motor. During this exploration stage we found an extremely important advantage of using IMU’s to collect sensor data. The ability to collect Roll, Pitch and Yaw angle introduced flexibility into the design by allowing a range of options to choose from. The final design incorporates two carefully calibrated Razor IMU’s, one on each thigh section of the exoskeleton legs, that gathers roll, pitch and yaw readings. This data, which we analyze and process through our own code inside an Arduino Mega, allows for the triggering system to actuate at 35 degrees from its initial position. The team initially fine tuned the data collection to utilize the comparison and analysis of Roll angle as the flex angle calculation, but later found that another method for distinguishing the two movements walking down the stairs and squatting was the comparison of Pitch angles. Because we can instantly compare data from both legs, the system can now differentiate between squatting and walking down the stairs, in addition to normal walking and walking up stairs.
Team: Oscar Segovia, Alex Lim, Karan Patel, Shubham Garg, Yakshu Madaan
Faculty Advisor: Dr. Homayoon Kazerooni
University of California, Berkeley
University of California, Berkeley