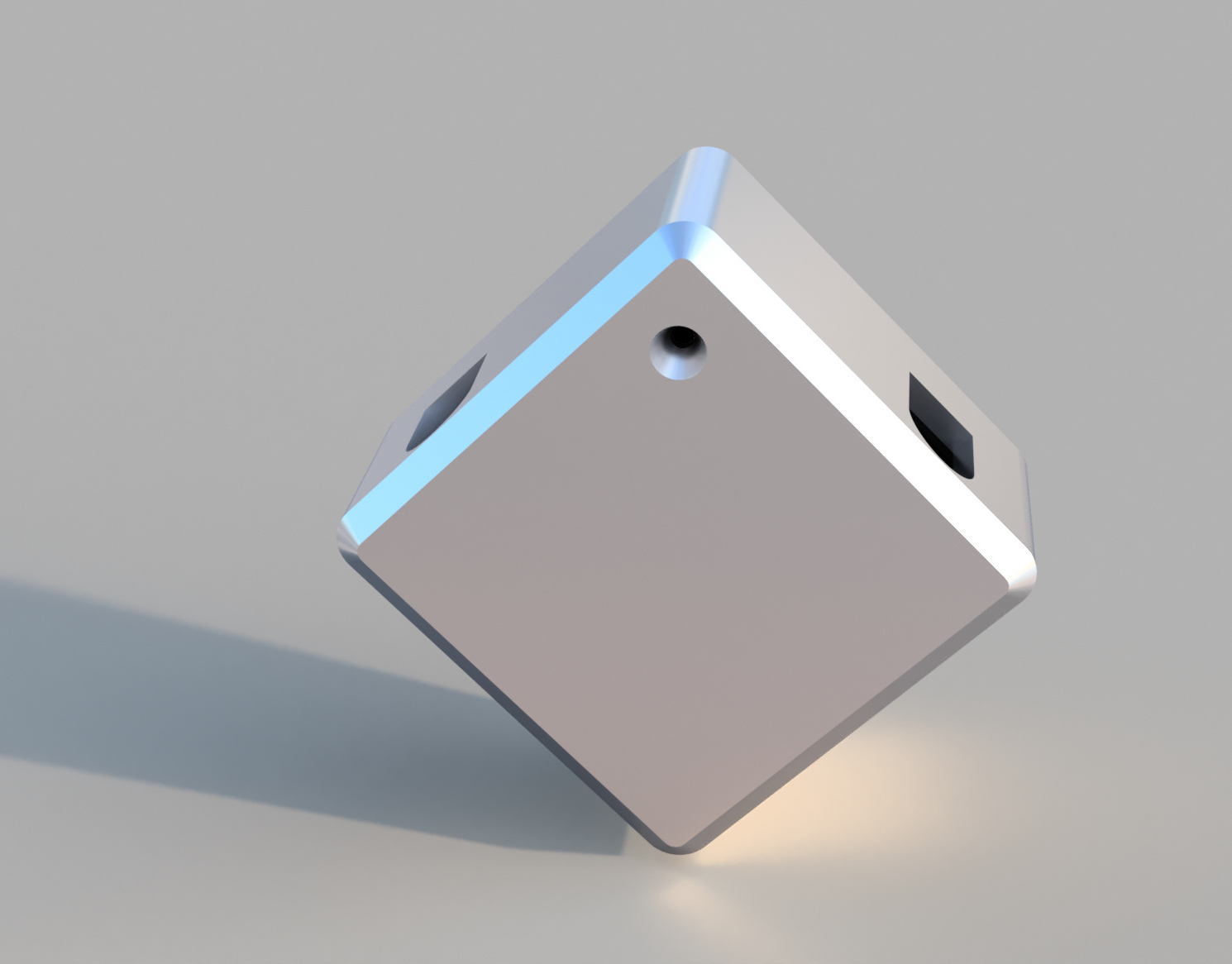
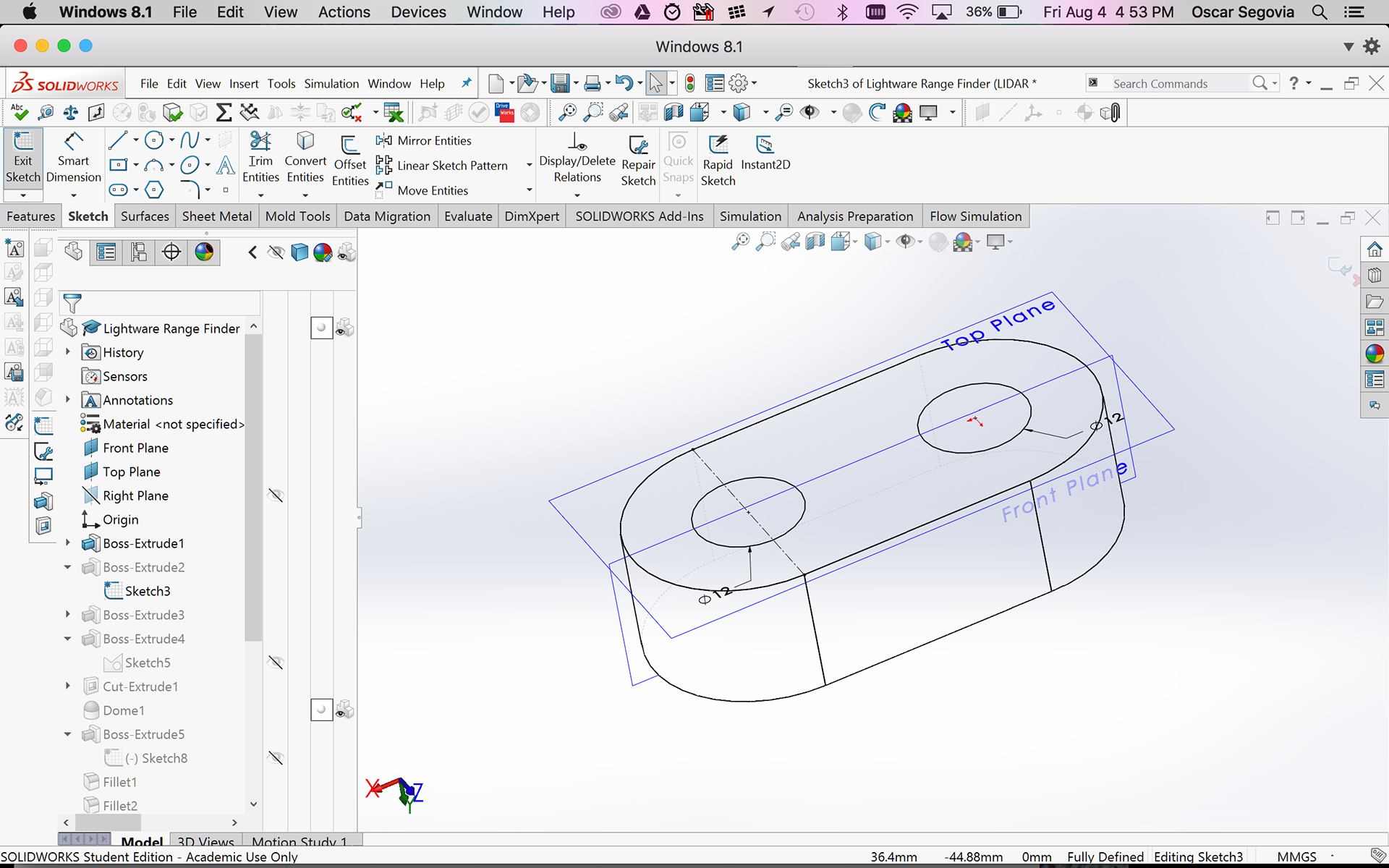
Reverse engineering the enclosure of a Long Distance Range Finder (LIDAR)



Tasked with recreating this and many other aerospace electronic components in 3D form to then design a support that will attach to a drone's fuselage and hold in place most of these components.
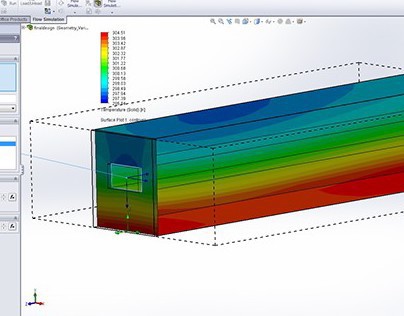
The goal: to model, simulate and fabricate its supporting structure within a Semi-Autonomous UAV, thus finding the most efficient placement based on weight distribution, adjacent electronics and vision range.
This technique allows us a safe way to iterate placement of components before cutting through the fuselage. By combining the power of 3D scanning with Solidworks we can generate virtual representations before committing to sacrifice prime real estate.
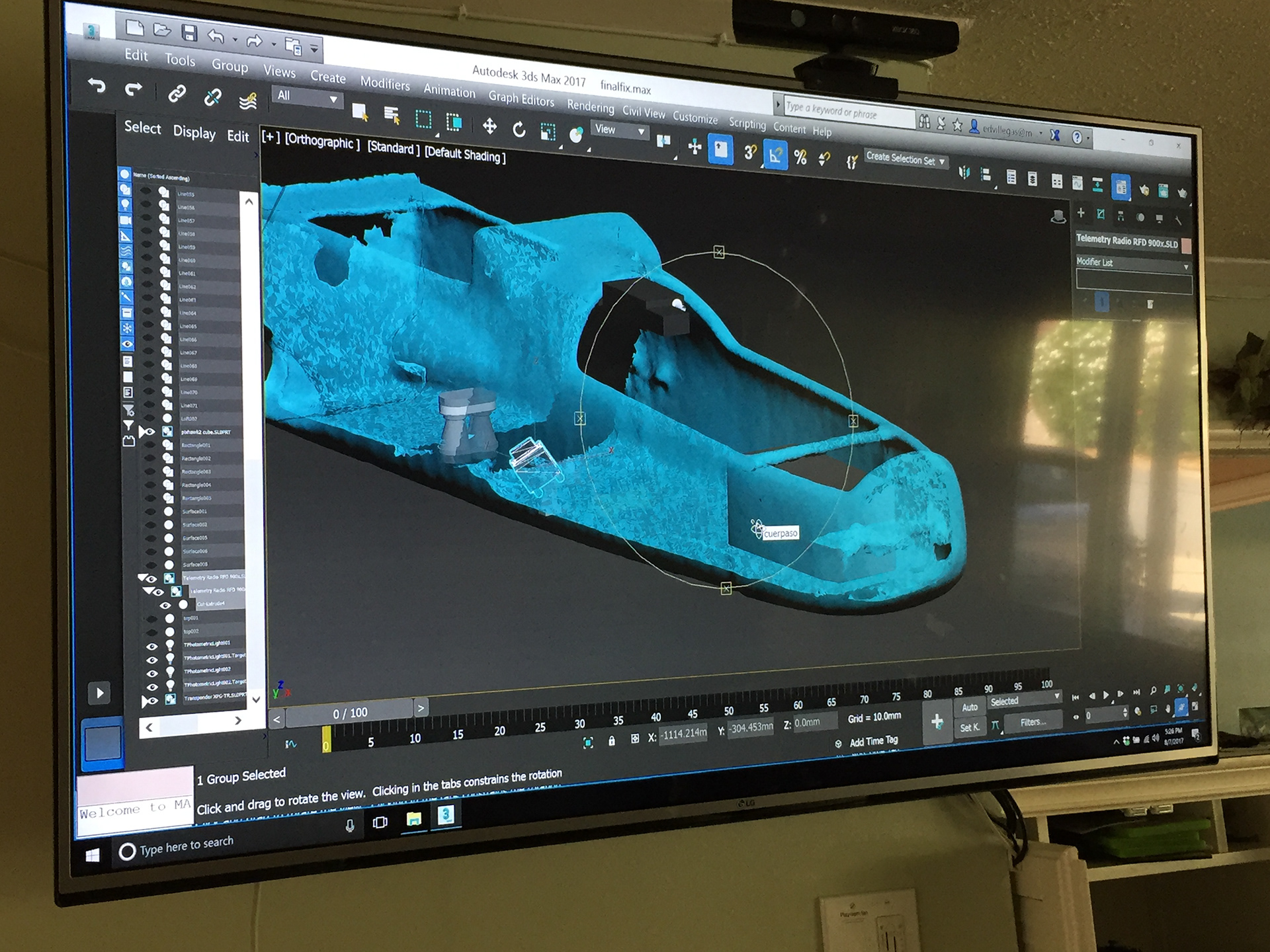


Example of another camera (Roadrunner) being modeled to find the best position within the fuselage.